Merocop
Prof. Mirco Becker
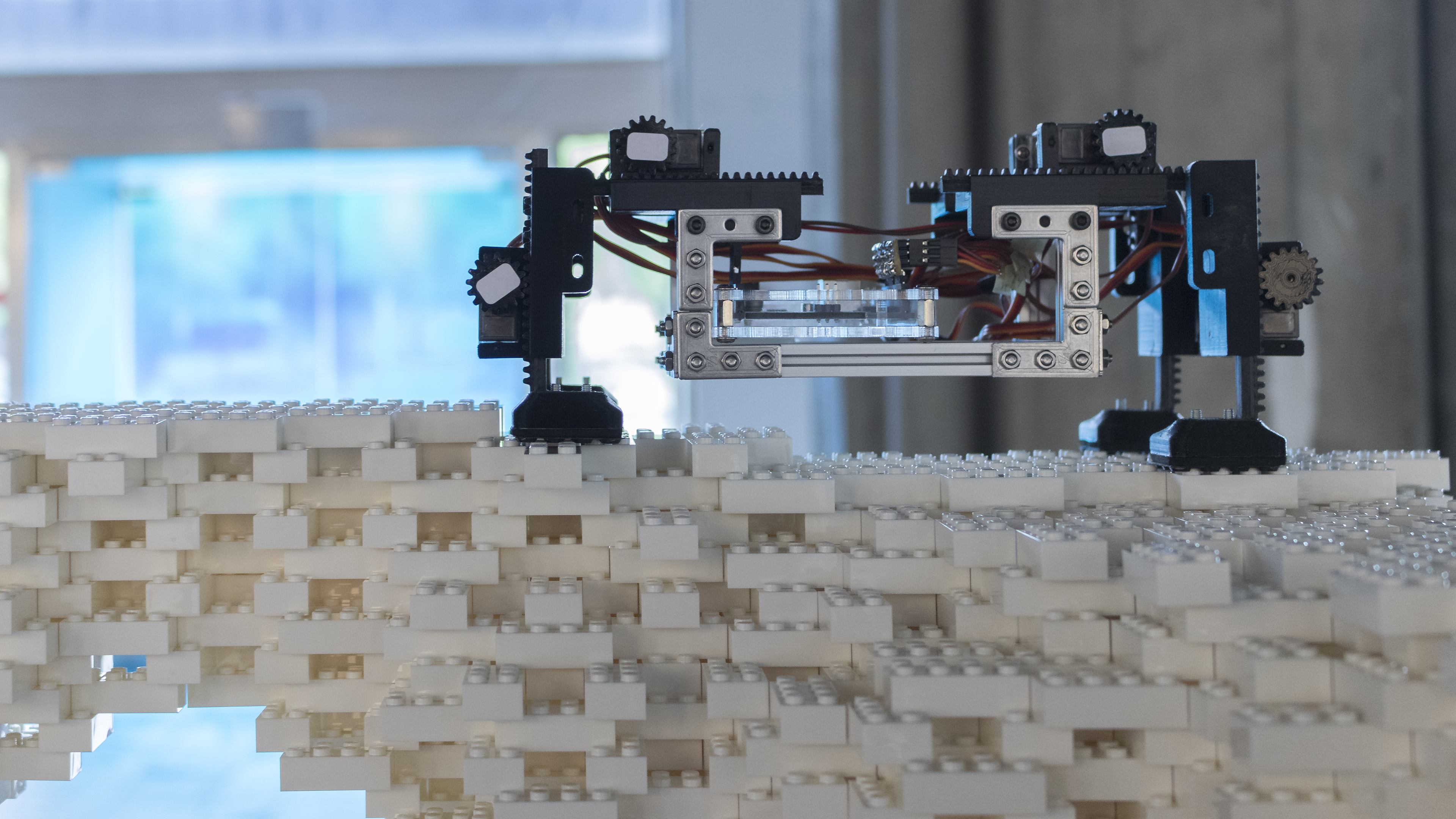
Das Projekt untersucht die Möglichkeiten einer laufenden mittelgroßen robotischen Konstruktionsplattform: merocop. Dies wurde als Alternative zu den beiden vorherrschenden Modellen der Baurobotik konzipiert: Die Umwidmung von industriellen 6-axen Robotern, sowie die Digitalisierung von traditionellen Baumaschinen. Der Ansatz einer Konstruktionsplattform als Laufroboter erlaubt neue Möglichkeiten der Skalierung von Baugröße und Bauzeit durch den Einsatz einer Vielzahl parallel arbeitender Roboter auf der Baustelle. Die Plattform ist durch 8 Beine angetrieben, jedes davon durch 2 Linearaktuatoren. Dieser Antrieb erlaubt, dass sich die Plattform in einem räumlichen orthogonalen Raster fortbewegen kann. Ihre Abmaße sind so, dass sie auf der Krone einer mindestens 200 mm breiten Wand laufen und klettern kann. Sie kann mit unterschiedlichen Werkzeugen ausgestattet werden, um Baumetrial additive oder subtraktiv zu verarbeiten.
merocop ist in Anlehnung an frühere Forschung für Laufroboter im Bauwesen wie dem Minibuilders Projekt des IAAC oder dem TERMS Project des Wyss Institut entwickelt. Die ersten merocop Prototypen wurden 2019 am Lehrstuhl als Vorforschung entwickelt. Parallel wurde in 2 Entwurfsprojekten die architektonischen Möglichkeiten untersucht. 2 DFG Projektanträge zur Plattform und Materialsystem sind in der Vorbereitung. Im Herbst 2020 wird der Lehrstuhl im Rahmen der Rob|Arch Konferenz an der Tsinghau Universität Beijing einen Workshop mit merocop geben.
Projektlaufzeit:
2019
Fördergeber:
DFG Projektantrag in Vorbereitung